


Certo, isso não é um exercício. Os robôs estão chegando.
A Nvidia anunciou um portfólio de tecnologias para impulsionar o desenvolvimento de robôs humanoides, incluindo o Nvidia Isaac GR00T N1, o primeiro modelo de fundação aberto e totalmente personalizável do mundo para raciocínio e habilidades humanoides generalizadas.
As outras tecnologias incluem frameworks de simulação e blueprints, como o Nvidia Isaac GR00T Blueprint para gerar dados sintéticos, assim como o Newton, um motor de física de código aberto — em desenvolvimento com a Google DeepMind e a Disney Research — projetado especificamente para o desenvolvimento de robôs.
Disponível agora, o GR00T N1 é o primeiro de uma família de modelos totalmente personalizáveis que a Nvidia irá pré-treinar e liberar para desenvolvedores de robótica em todo o mundo — acelerando a transformação de indústrias enfrentando escassez de mão de obra global estimada em mais de 50 milhões de pessoas.
“A era da robótica generalista chegou”, disse Jensen Huang, fundador e CEO da Nvidia, em um comunicado. “Com o Nvidia Isaac GR00T N1 e novas estruturas de geração de dados e aprendizado de robôs, os desenvolvedores de robótica em todos os lugares irão abrir a próxima fronteira na era da IA.”
A empresa divulgou a notícia durante o discurso de abertura de Huang no evento GTC 2025.
“Isso pode ser a maior indústria de todas”, disse Huang.
Ele observou que o aprendizado por reforço e recompensas verificáveis (na forma de física) impulsionarão a tecnologia robótica para frente.
“Precisamos de um motor de física projetado para corpos macios e rígidos de alta granularidade,” ele disse. “Precisamos que seja acelerado por GPU para que esses virtuais possam viver em tempo superlinear.”
O modelo de fundação GR00T N1 possui uma arquitetura de sistema dual, inspirada em princípios da cognição humana. “O Sistema 1” é um modelo de ação de pensamento rápido, espelhando reflexos ou intuição humana. “O Sistema 2” é um modelo de pensamento lento para tomada de decisões deliberadas e metódicas.
Movido por um modelo de linguagem visual, o Sistema 2 raciocina sobre seu ambiente e as instruções que recebeu para planejar ações. O Sistema 1 então traduz esses planos em movimentos robóticos precisos e contínuos. O Sistema 1 é treinado em dados de demonstração humana e uma quantidade massiva de dados sintéticos gerados pela plataforma Nvidia Omniverse.
O GR00T N1 pode facilmente generalizar em tarefas comuns — como agarrar, mover objetos com um ou ambos os braços e transferir itens de um braço para outro — ou realizar tarefas multietapas que requerem um longo contexto e combinações de habilidades gerais. Essas capacidades podem ser aplicadas em casos de uso como manuseio de materiais, embalagem e inspeção.
Desenvolvedores e pesquisadores podem treinar o GR00T N1 com dados reais ou sintéticos para seu robô humanoide específico ou tarefa.
Em seu discurso na GTC, Huang demonstrou o robô humanoide da 1X realizando tarefas domésticas de forma autônoma usando uma política pós-treinada baseada no GR00T N1. As capacidades autônomas do robô são o resultado de uma colaboração de treinamento de IA entre a 1X e a Nvidia.
“O futuro dos humanoides é sobre adaptabilidade e aprendizado,” disse Bernt Børnich, CEO da 1X Technologies, em um comunicado. “O modelo GR00T N1 da Nvidia fornece um grande avanço para o raciocínio e habilidades robóticas. Com uma quantidade mínima de dados pós-treinamento, conseguimos implantar totalmente no NEO Gamma — avançando nossa missão de criar robôs que não são ferramentas, mas companheiros que podem ajudar os humanos de maneiras significativas e imensuráveis.”
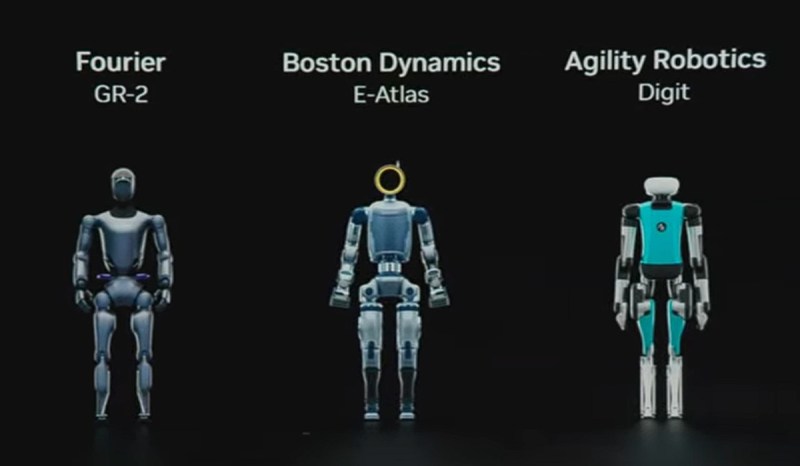
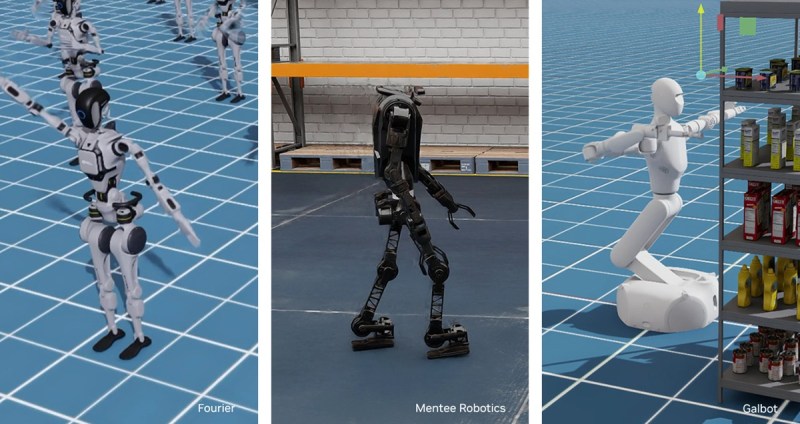
Entre os desenvolvedores de humanoides líderes mundialmente com acesso antecipado ao GR00T N1 estão Agility Robotics, Boston Dynamics, Mentee Robotics e Neura Robotics.
Nvidia, Google DeepMind e Disney Research Focam em Física
A Nvidia anunciou uma colaboração com a Google DeepMind e a Disney Research para desenvolver o Newton, um motor de física de código aberto que permite que robôs aprendam a lidar com tarefas complexas com maior precisão.
Construído sobre a estrutura Nvidia Warp, o Newton será otimizado para aprendizado robótico e compatível com frameworks de simulação como o MuJoCo da Google DeepMind e o Nvidia Isaac Lab. Além disso, as três empresas planejam permitir que o Newton utilize o motor de física da Disney.
A Google DeepMind e a Nvidia estão colaborando no desenvolvimento do MuJoCo-Warp, que deve acelerar as cargas de trabalho de aprendizado de máquina em robótica mais de 70 vezes e estará disponível para desenvolvedores por meio da biblioteca de código aberto MJX da Google DeepMind, bem como através do Newton.
A Disney Research será uma das primeiras a usar o Newton para avançar sua plataforma de personagens robóticos que alimenta robôs de entretenimento de próxima geração, como os expressivos droids inspirados em Star Wars, que se juntaram a Huang no palco durante seu discurso na GTC.
“Os droids BDX são apenas o começo. Estamos comprometidos em trazer mais personagens à vida de maneiras que o mundo nunca viu antes, e essa colaboração com a Disney Research, Nvidia e Google DeepMind é uma parte chave dessa visão,” disse Kyle Laughlin, vice-presidente sênior da Walt Disney Imagineering Research & Development, em um comunicado. “Essa colaboração nos permitirá criar uma nova geração de personagens robóticos que são mais expressivos e envolventes do que nunca — e se conectar com nossos convidados de maneiras que apenas a Disney pode.”
A Nvidia e a Disney Research, juntamente com a Intrinsic, anunciaram uma colaboração adicional para construir pipelines OpenUSD e melhores práticas para fluxos de dados de robótica.
Mais Dados para Avançar o Pós-Treinamento em Robótica
Conjuntos de dados grandes, diversos e de alta qualidade são críticos para o desenvolvimento de robôs, mas custosos de capturar. Para humanoides, dados reais de demonstração humana são limitados pelo dia de 24 horas de uma pessoa.
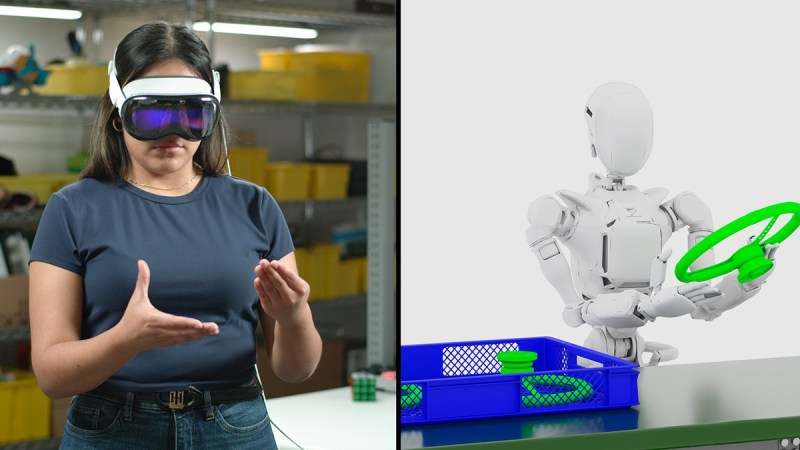
Anunciado hoje, o Nvidia Isaac GR00T Blueprint para geração de movimento sintético de manipulação ajuda a abordar esse desafio. Construído sobre a Omniverse e os modelos de fundação Nvidia Cosmos Transfer, o blueprint permite que desenvolvedores gerem quantidades exponencialmente grandes de dados de movimento sintético para tarefas de manipulação a partir de um pequeno número de demonstrações humanas.
Usando os primeiros componentes disponíveis para o blueprint, a Nvidia gerou 780.000 trajetórias sintéticas — o equivalente a 6.500 horas, ou nove meses contínuos, de dados de demonstração humana — em apenas 11 horas. Então, combinando os dados sintéticos com os dados reais, a Nvidia melhorou o desempenho do GR00T N1 em 40%, em comparação com o uso apenas de dados reais.
Para ainda mais equipar a comunidade de desenvolvedores com dados de treinamento valiosos, a Nvidia está liberando o conjunto de dados do GR00T N1 como parte de um conjunto de dados maior de IA física de código aberto — também anunciado na GTC e agora disponível no Hugging Face.
Disponibilidade
Os dados de treinamento e cenários de avaliação de tarefas do Nvidia GR00T N1 estão agora disponíveis para download no Hugging Face e no GitHub. O Nvidia Isaac GR00T Blueprint para geração de movimento sintético de manipulação também está agora disponível como uma demonstração interativa em build.nvidia.com ou para download no GitHub.
O supercomputador pessoal de IA Nvidia DGX Spark, também anunciado hoje na GTC, fornece aos desenvolvedores um sistema pronto para uso para expandir as capacidades do GR00T N1 para novos robôs, tarefas e ambientes sem extensa programação personalizada. O motor de física Newton deve estar disponível ainda este ano.
No GTC 2025, a Nvidia realizará sessões do Humanoid Developer Day, incluindo:
● “Uma Introdução à Construção de Robôs Humanoides” para uma imersão no Nvidia Isaac GR00T;
● “Insights na Plataforma de Personagens Robóticos da Disney” para aprender como a Disney Research redefine a robótica de entretenimento com droids BDX;
● “Anunciando Mujoco-Warp e Newton: Como a Google DeepMind e a Nvidia estão Supercarregando o Desenvolvimento Robótico” para um olhar mais profundo sobre essas novas tecnologias e como a Google aplica modelos de IA para treinar humanoides alimentados por IA para tarefas do mundo real.

Conteúdo relacionado
AllTrails lança assinatura de $80/ano que inclui rotas inteligentes com tecnologia de IA.
[the_ad id="145565"] AllTrails, o companheiro de caminhadas e ciclismo nomeado como o App do Ano para iPhone de 2023, está lançando uma nova assinatura premium chamada “Peak”,…

Melhorias nos modelos de IA de ‘raciocínio’ podem desacelerar em breve, aponta análise.
[the_ad id="145565"] Uma análise da Epoch AI, um instituto de pesquisa em IA sem fins lucrativos, sugere que a indústria de IA pode não conseguir obter grandes ganhos de…
Co-fundador da Anthropic, Jared Kaplan, virá ao TechCrunch Sessions: AI
[the_ad id="145565"] Está com vontade de aprender mais sobre a Anthropic diretamente da fonte? Você não está sozinho, e é por isso que estamos animados em anunciar que Jared…